Una de las posibles actividades que puede desarrollar un robot colaborativo, es la de atornillado. Existen muchos ejemplos de esto y empresas que fabrican las herramientas para integrar un robot al proceso de atornillado.
Decidimos entonces investigar sobre este tipo de aplicación con nuestro UR5 y desarrollar todos los aspectos involucrados en la herramienta de atornillado, a manera de prueba de concepto. Diversos retos fueron identificados:
- Fabricación de la herramienta – prototipo – adaptable al robot.
- Integración de la herramienta con el robot.
- Elaboración de un URCap para controlar desde el robot la aplicación de atornillado.
- Pruebas.
Fabricación de la herramienta
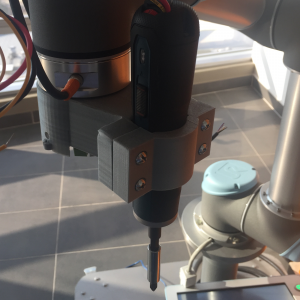
Existen ejemplos de aplicación de atornillado utilizando un UR3. Este robot permite un giro de 360° de su última articulación. Este no es el caso del UR5. Por lo tanto, para no tener que desarrollar un atornillador, decidimos comprar uno. Con una inversión de unos 30 USD, compramos un atornillador inalámbrico Bosch EasyGo.
Esto nos permitió concentrarnos en dos aspectos del desarrollo de la adaptación:
- El diseño y fabricación de un sistema de acople del atornillador al brazo del robot.
- El diseño y fabricación de la electrónica necesaria para controlar desde el robot las funciones básicas del atornillador.
Fabricación del acople atornillador-robot
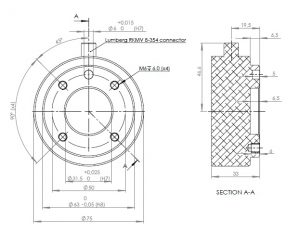
Varios aspectos se tuvieron en cuenta en el diseño del acople atornillador-robot: peso del atornillador, sentido del torque y dimensiones. Mecánicamente, el manual del UR5 contiene la información necesaria para diseñar cualquier herramienta.
También se tuvieron en cuenta aspectos como facilidad de utilización (que fuera fácil el ajuste del atornillador) y reutilización (en caso de requerir para otro tipo de aplicación), y estética (la belleza de una herramienta hace parte del ADN de lo que hacemos en Phystech – la herramienta no solo debe ser funcional, también bella).
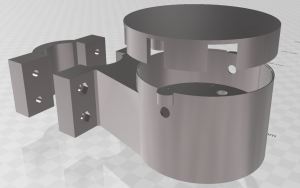
Después de varios borradores e ideas, llegamos al siguiente diseño: