One of the possible activities that a collaborative robot can develop is screwing. There are many examples of this and companies that manufacture the tools to integrate a robot into the screwing process.
We decided then to investigate this type of application with our UR5 and develop all the aspects involved in the tightening tool by creating a proof of concept. Various challenges were identified:
- Manufacture of the tool – prototype – adaptable to the robot.
- Robot integration with the tool.
- Development of a URCap to control the screwing application from the robot.
- Tests.
Tool making
There are examples of screw driving applications using a UR3. This robot allows a 360 ° rotation of its last joint. It is not the case with the UR5. Therefore, in order not to have to build our own screwdriver, we decided to buy one. With an investment of about $ 30 usd, we bought a Bosch Easy Go cordless screwdriver.
This allowed us to focus on two aspects of adaptation development:
- The design and manufacture of a system for coupling the screwdriver to the robot arm.
- The design and manufacture of the electronics necessary to control the basic functions of the screwdriver from the robot.
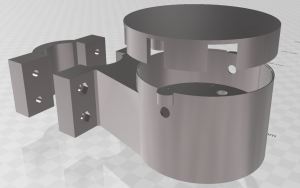
Design & Construction of the screwdriver-robot coupling
Several aspects were taken into account in the design of the screwdriver-robot coupling: screwdriver weight, torque sense and dimensions. Mechanically, the UR5 manual contains the information necessary to design any tool.
Many aspects were taken into consideration, such as ease of use (so it is easy to adjust the screwdriver), reuse (if required for another type of application), and aesthetics (the beauty of a tool is part of the DNA of what we do in Phystech – the tool should not only be functional, but also beautiful).
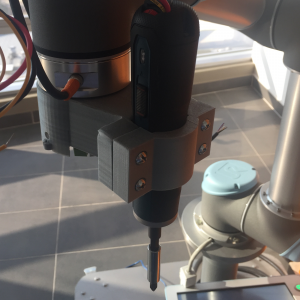
After several drafts and ideas, we came with the following design and first prototype.